אוטומציה ובקרה – בקר דיגיטלי ישיר Direct Digital Controller -DDC
המונח DDC מייצג בד"כ בקרה דיגיטלית ישירה (Direct Digital Control) אך גם בקר דיגיטלי ישיר (Direct Digital Controller).
בקרה מסוג DDC היא בקרה אוטומטית של מצב או תהליך ע"י בקר דיגיטלי. בקר מסוג DDC מורכב מבקרים מבוססים על מיקרופרוססורים (microprocessors) עם בקרה לוגית מבוצעת בעזרת תוכנה. מתמרים אנלוגיים/דיגיטליים (analog-to-digital (A/D) converters) מתמירים ערכים אנלוגיים לאותות דיגיטליות שמיקרופרוססור יכול להשתמש בהן. רגשים אנלוגיים יכולים להפיק ערכי התנגדות, מתח או זרם. רוב מערכות הבקרה מבזרים את התוכנה בין בקרים מרוחקים (remote) כדי להימנע מהצורך ביכולת בתקשורת רציפה ולאפשר יכולת פעולה עצמאית (stand-alone) של הבקרים. מחשב המערכת משמש בעיקר לניטור המצב של מערכת ניהול האנרגיה, שימור עותקי תוכניות לגיבוי, ולרישום התראות ואירועים.
יתרונות ה- DDC – בקר דיגיטלי ישיר
יתרונות בקרת DDC מעל לטכנולוגיות בקרה קודמות (פניאומאטיקה או בקרה אלקטרונית מבוזרת) מתבטאות בשיפור יעילות הבקרה במערכת. שלושת יתרונות העיקריים של בקרת DDC הם:
- שיפור ביעילות הבקרה
- שיפור ביעילות תפעול המערכת
- שיפור ביעילות השימוש באנרגיה
שיפור ביעילות הבקרה
DDC מעניקה בקרה יעילה יותר של מערכות חימום, אוורור ומיזוג אוויר (HVAC – Heating, Ventilating and Air Conditioning), ע"י הפקת נתונים מנוטרים מדויקים יותר. הרגשים האלקטרוניים שמודדים את הפרמטרים הנפוצים במערכות HVAC (טמפרטורה,לחות ולחץ) הם מטבעם מדויקים בהרבה מקודמיהם הפניאומאטיים. מכיוון שלוגיקת חוג הבקרה כלול בתוכנת ה- DDC, ניתן לשנות את הלוגיקה הזו בקלות. כך, ה- DDC מעניק גמיש רבה יותר בשינוי לו"ז לאיפוס (reset), נקודות נקבעות (set points) ולוגיקת בקרה מערכתית.
שיפור ביעילות תפעול המערכת
מערכות DDC מטבעם יכולות להשתלב בקלות רבה בתוך מערכות מבוססות על מחשב, כגון מערכות בקרת אש, כניסה/אבטחה (access/security), תאורה, ניהול תחזוקה, ועוד. יכולות המגמות ב- DDC מאפשרות לטכנאי או מהנדס לאתר תקלות ולפתור אותן. יכולות אלו מאפשרות גם להציג את הנתונים בפורמטים שונים. הנתונים מאפשרים קריאה של המגמות שיכולות להישמר ולעבור ניתוח לגילוי מגמות של ביצועי המערכות לאורך נתון.
שיפור ביעילות השימוש באנרגיה
קיימות אסטרטגיות בקרה רבות להשגת יעילות בשימוש באנרגיה בלוגיקה פניאומטית שניתנות לשכפול בלוגיקת DDC. האפשרות להוסיף פונקציות מתמטיות מורכבות יותר (שמושגות בקלות בתוכנה), מובילה לשגרות(routines) נוספות יעילות מבחינה אנרגטית שניתנות לשימוש עם DDC.
אסטרטגיות כגון ניטור והגבלת צריכת אנרגיה ניתנות להשגה בקלות עם מערכות DDC. אפשר לנטר ולבקר צריכה כוללת במתקן יצור ע"י איפוס נקודות נקבעות (set points) מבוססות על רמות צריכה שונות.
דפוסי צריכת אנרגיה ניתנות לניטור ע"י אחסנת מגמות. אפשר גם לקבוע לו"ז של הפעלת/כיבוי (on/off) ציוד באפליקציות בהן הלו"ז משתנה בתכיפות.
רכיבי בקר דיגיטלי ישיר DDC
נקודות (Points)
המונח נקודה (Point) משמש לתיאור מיקום אחסנת נתונים במערכת DDC. הנתונים יכולים להגיע מרגשים או מלוגיקה או חישובי תוכנה. למיקום כל נתון מאוחסן יש אמצעי ייחודי לזיהוי או מיעון.
נתונים (Data)
נתוני DDC ניתנים לסיווג בשלושה אופנים:
- לפי סוג (type)
- לפי כיוון זרימה (flow direction)
- לפי מקור (source)
נתונים לפי סוג (Data Type)
לפי סיווג זה, נתונים יכולים להיות דיגיטליים, אנלוגיים ומצטברים.
נתונים דיגיטליים נקראים גם דיסקרטיים או בינאריים. ערך של נתון דיגיטלי יכול להיות 0 או 1, ומייצג בד"כ מצב או סטאטוס של קבוצת מגעים.
נתונים אנלוגיים הם מספריים, דצימאליים, ובד"כ מציגים ערכי כניסה כגון טמפרטורה,לחות יחסית ולחץ, או משתנה אחר הנמדד במערכת חימום, אוורור ומיזוג אוויר (HVAC – Heating, Ventilating and Air Conditioning).
נתונים מצטברים הם גם מספריים, דצימאליים, אך כאן סיכום הערכים מאוחסן.
נתונים לפי כיוון זרימה (Data Flow Direction)
נתונים אלו מתייחסים לכיוון הזרימה ביחס לרכיב/לוגיקת DDC: נקודות כניסה מציגות נתונים המשמשים כמידע נכנס ל- DDC, ונקודות יציאה מציגות מידע יוצא מה- DDC.
נתונים לפי מקור (Data Source)
נתונים ניתנים לסיווג כחיצוניים אם הם מתקבלים מרכיב חיצוני או נשלחים לרכיב חיצוני. נקודות חיצוניות נקראות לפעמים נקודות חומרה. נתונים חיצוניים יכולים להיות דיגיטליים, אנלוגיים ומצטברים, וכמו כן יכולים להיות נתוני כניסה או יציאה.
נתונים פנימיים מייצגים נתונים מופקים ע"י הלוגיקה של תוכנת הבקרה. נתונים אלו יכולים להיות דיגיטליים, אנלוגיים ומצטברים. מונחים המשמשים לכינוי נקודות פנימיות הם נקודות וירטואליות, נקודות מספריות, נקודות נתונים ונקודות תוכנה.
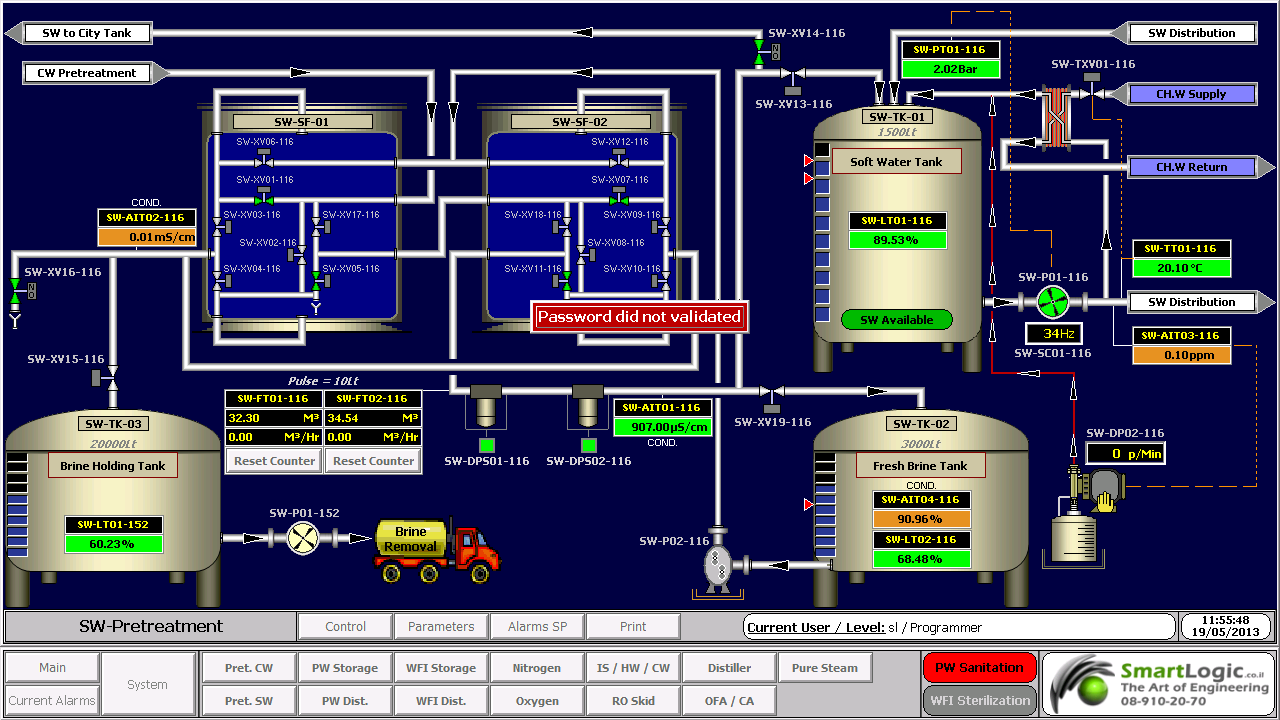
סמארטלוג'יק מעניקה שירותים המסתמכים על ידע וניסיון רב בעבודה עם מערכות מים, RO ,CIP, מזקקות, מערכות HVAC ,Utilities, ומודולים מוכנים סטנדרט S-88 שפיתחנו עבור מערכות אלו